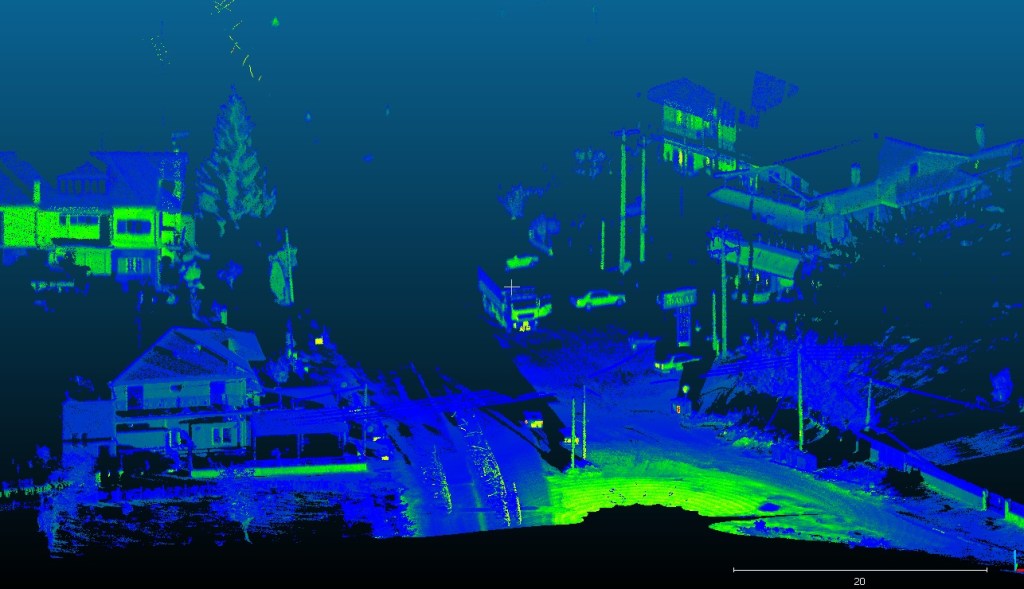
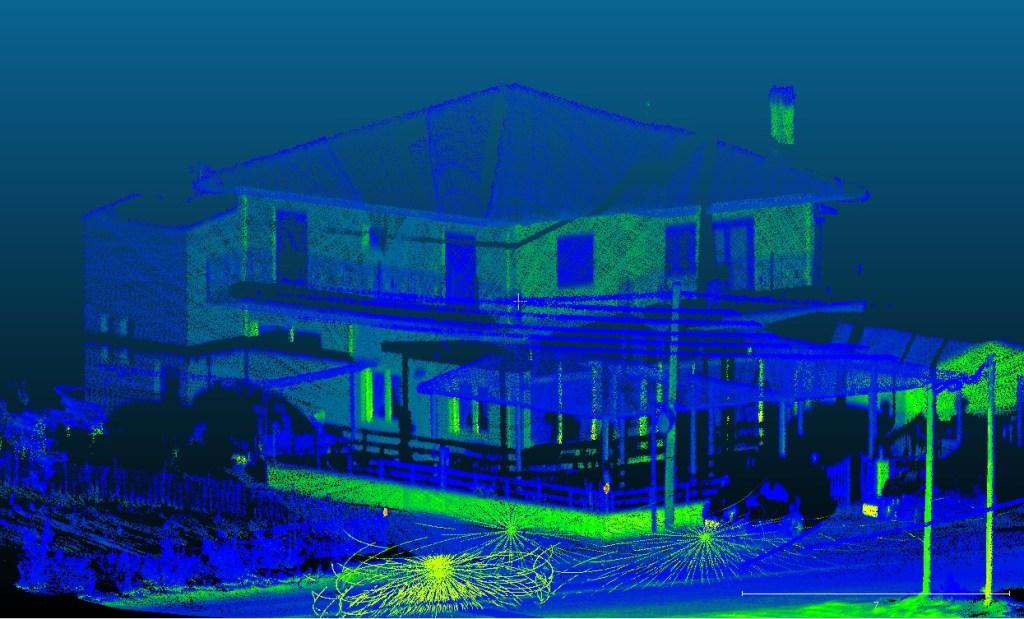
Η ανάπτυξη τεχνολογιών χαμηλού κόστους και μαζικών συστημάτων GNSS και 3D Laser Scanner για την αξιοποίηση τους σε αυτόνομα αυτοκίνητα έδωσε επίσης τη δυνατότητα για την εφαρμογή τους και στον τομέα της τοπογραφίας. Αναλύουμε παρακάτω την ανάπτυξη ενός 3D Laser Scanner για αποτυπώσεις μεγάλης κλίμακας σε μικρό χρόνο. Το Laser scanner που χρησιμοποιήθηκε είναι το Livox Mid-40 (1) με βασικά χαρακτηριστικά FOV 38.4° κυκλικό, ακρίβεια 2 εκ. και μέγιστη απόσταση μέτρησης 260 μ. Η μονάδα Lidar τοποθετείτε σε τρίποδο επάνω σε φωτογραφική βάση με οριζόντια γωνιομέτρηση είτε σε Total Station (2). Το τελικό αποτέλεσμα είναι ένα 3D Point Cloud 38.4° κάθετα και 360° οριζόντια. Η μονάδα Lidar χρειάζεται μπαταρία 12v για τη λειτουργία της, όπως επίσης και μια μονάδα υπολογιστή για την λειτουργία του driver αλλά και την αποθήκευση των δεδομένων. Χρησιμοποιήθηκε το Raspberry Pi 4 και αναπτύχθηκε κώδικας για την ένωση των scans κάθε 18°. Το τελικό 3D Point Cloud είναι αποτέλεσμα από 20 scans (3,4). Για την επεξεργασία των scans χρησιμοποιήθηκε το open source 3D point cloud and mesh processing software CloudCompare Τέλος, αναπτύχθηκε αλγόριθμος για την εισαγωγή RGB πληροφορίας στο point cloud ταυτόχρονα με το κάθε scan από φωτογραφική μηχανή (5).