
Consumer and low cost drones have recently become very attractive for photogrammetric data acquisition for a wide range of applications. In this post we present the workflow for a photogrammetric survey and the results obtained comparing the Phantom 4 Pro V2 and the well known Parrot Anafi drone.
Apart from the weight, the main and important difference between these two drones is the camera system. Phantom 4 Pro V2 comes with a 1’’ CMOS 20MP with global shutter while Anafi has a 1/2.4’’ CMOS at 21MP with electronic shutter. The shutter makes an impact when flying large areas where the speed is important, thus a sensor with electronic shutter is a disadvantage.
For the comparison two datasets one from each drone where processed, see below details:
- Cloudy day with no wind
- Flying Height ~50m
- Vertical images
- Overlap ~70%
- 6 Ground Controls and 3 check points surveyed with GNSS RTK
The Aerial triangulation estimated the following results:
Phantom 4 Pro V2
GCPs RMSe: Xerror(m) = 0.003 Yerror(m) = 0.004 Zerror(m) = 0.003
Check points: Xerror(m) = 0.009 Yerror(m) = 0.009 Zerror(m) = 0.031
Parrot Anafi
GCPs RMSe: Xerror(m) = 0.006 Yerror(m) = 0.013 Zerror(m) = 0.012
Check points: Xerror(m) = 0.009 Yerror(m) = 0.023 Zerror(m) = 0.069
A digital Surface model produced for each dataset at a GSD of 5cm from the generated point clouds.
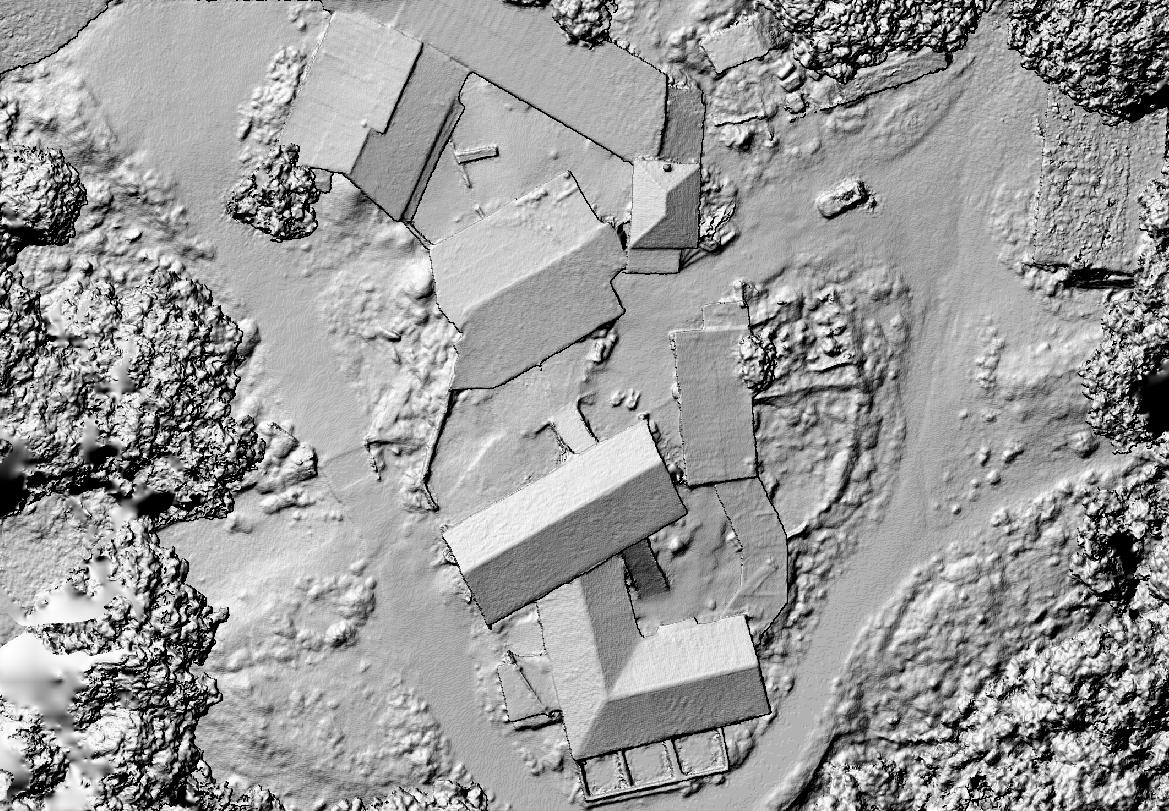
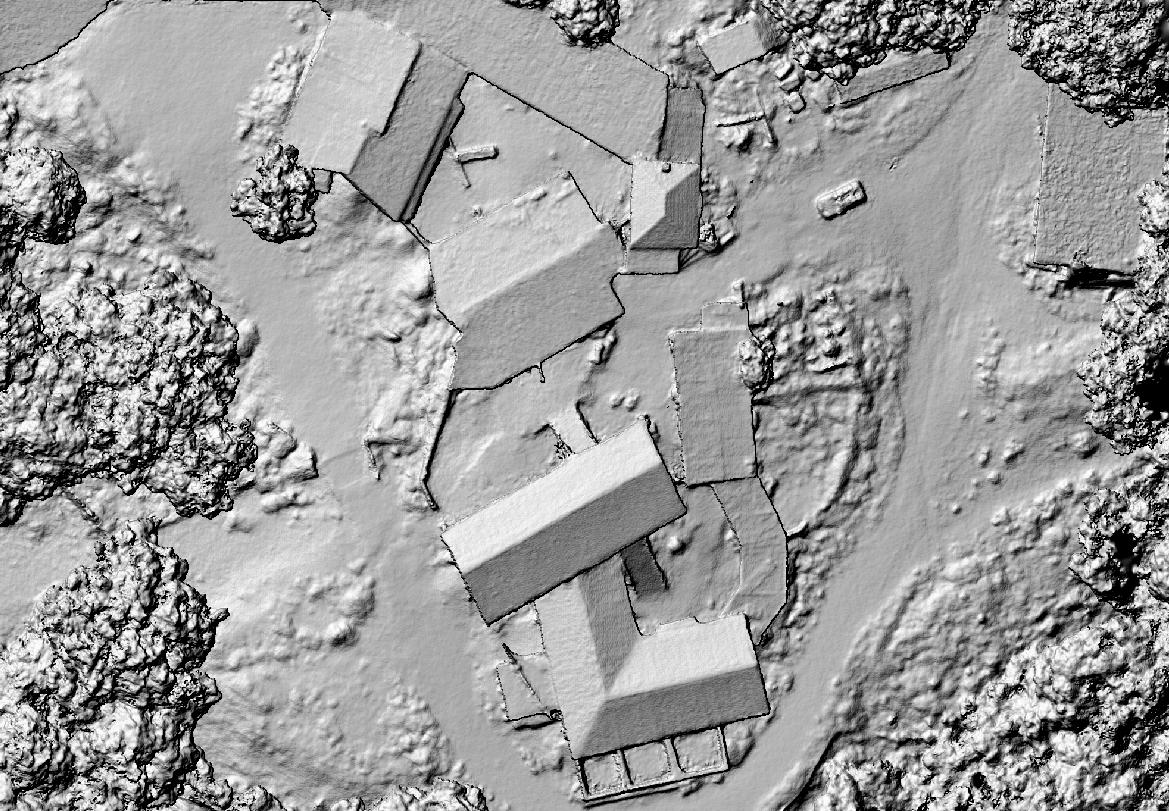
15 random points where measured to find the height differences between the two DSMs (m):
average = -0.01m max = 0.05m min=-0.16m std=0.05m median = 0.01m
In addition an orthophoto produced at a GSD of 1cm.




In conclusion we found out as expected that Phantom 4 Pro V2 achieved overall better results than Anafi did, however the horizontal difference between them was negligible. Ongoing analysis is investigating the robustness of a bundle adjustment using oblique images in order to increase the accuracy of Anafi dataset.
