
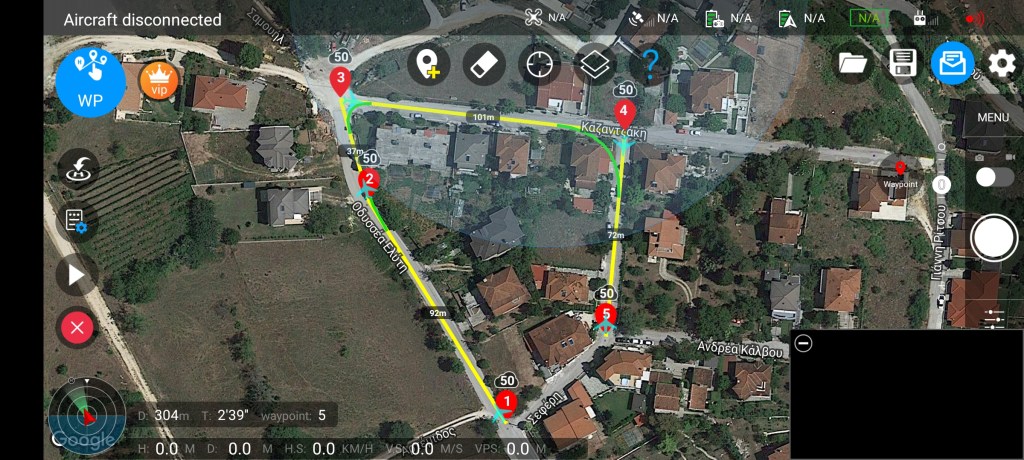
In this post we propose a method to perform low cost mapping with DJI Mini 2 drone using free tools in order to create missions or flying over waypoints. Recently a number of drone applications have included in their supported drones the DJI Mini 2. Thus, it is straightforward to create a flight plan with waypoints in order to map an area of interest such as a road or a river triggering the camera using the intervalometer every 2 or 3 seconds according to flying speed of the drone.
Mapping with DJI Mini 2
As said before, planning a linear mission is straightforward. Furthermore, below we describe how we could plan a correct and efficinet rectangular mission over an area. In order to do this we need to estimate the image footprint on the ground so the distance between every flight line can be calculated.
After a camera calibration the mini 2 camera parameters are (these are different for every drone):
Focal Length 4.91mm
Width 6.476mm / 4000pixels
Height 4.857mm / 3000pixels
Pixel Size 0.0016mm
Using the collinearity equations we calculated the flight height, GSD and image footprint for these cases:
- GSD 0.01m – Height 30m – 40m x 30m footprint – 80% side overlap 8m / flight line
- GSD 0.02m – Height 60m – 80m x 60m footprint – 80% side overlap 16m / flight line
- GSD 0.03m – Height 90m – 120m x 90m footprint – 80% side overlap 24m / flight line
Forward overlap is calculated according to flight speed and trigger interval e.g. 20 kph = 5.56m/sec
For 80% forward overlap from 90m flight height the trigger distance should be 18m so
with a flight speed of 20 kph the interval should be set to 3sec. For 30 kph flight speed the interval should be set to 2sec
Rectangular mission for DJI Mini 2 drone
Once we estimate the desired overlap using the calculations above we can draw the rectangular mission. We use CAD or GIS software. In this case we utilize the QGIS open source GIS software to draw the mission and export it in KML file. Consequently we upload the KML file on the drone app in order to accomplish the flight.
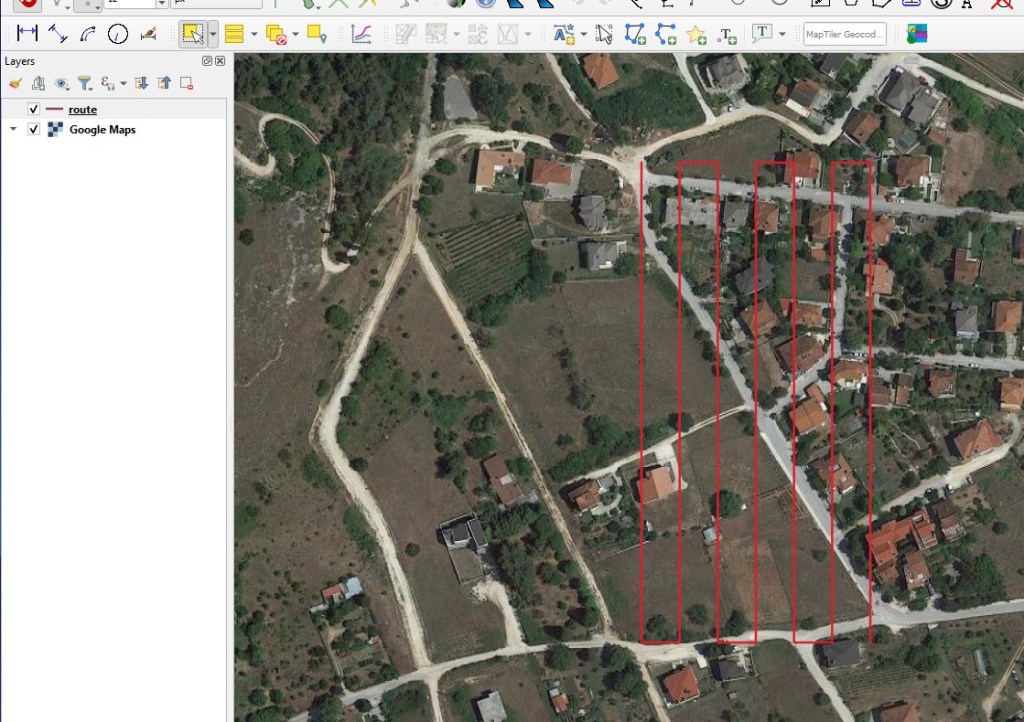
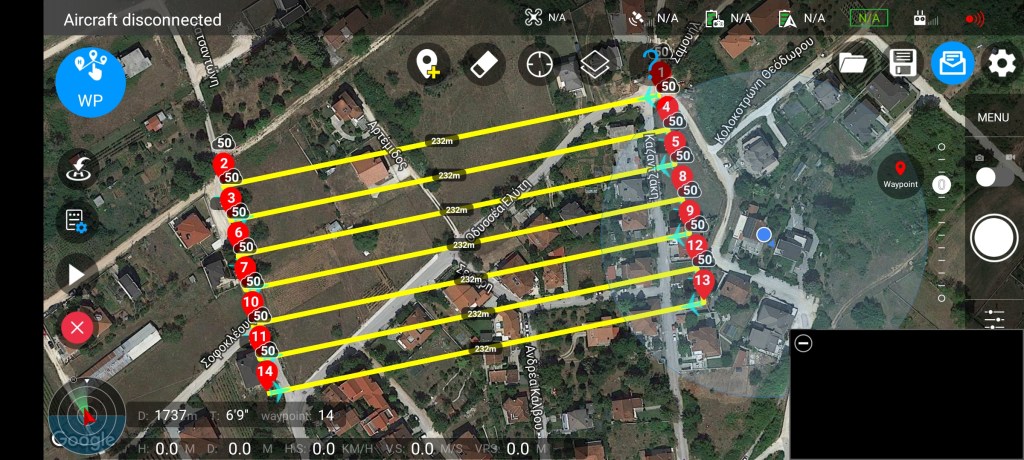
Then we import the kml file with the rectangular mission in the drone application and perform the flight
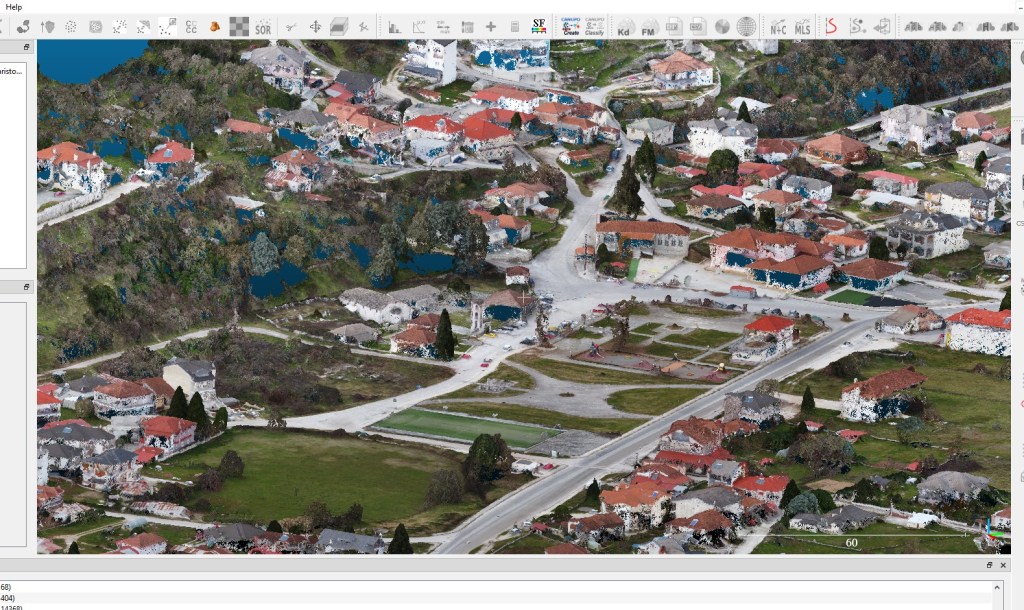
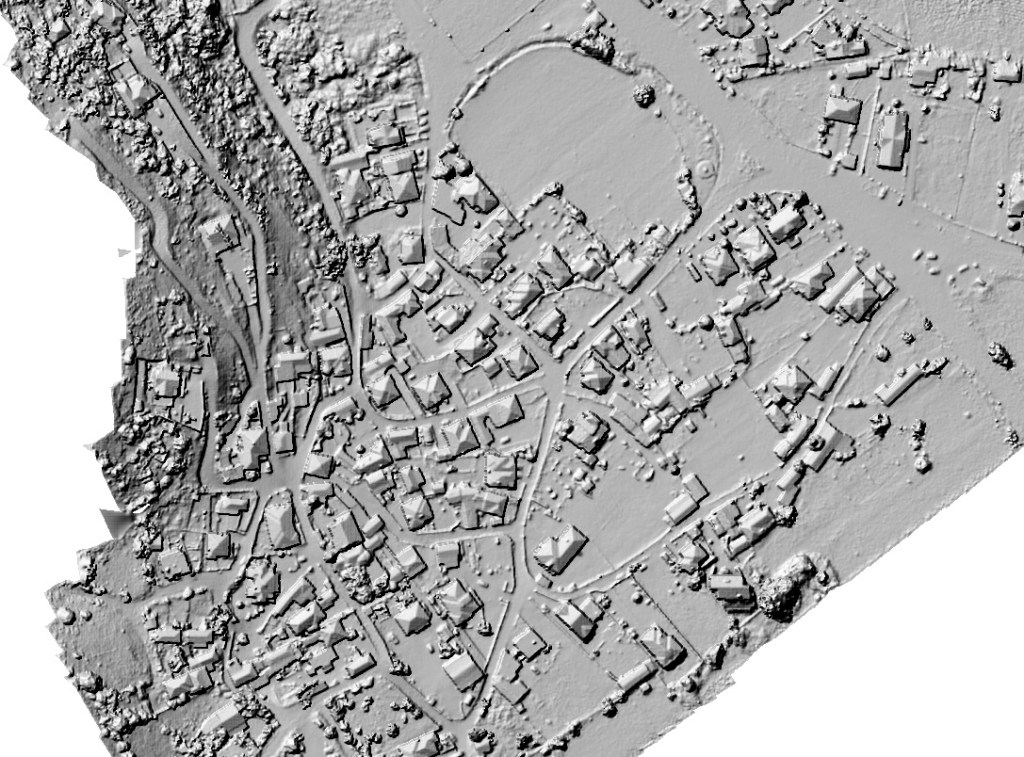
Results
Below results are presented from another test performed using the proposed method

Good day,
Fantastic work and great results. The only question I have is what program do you use to upload kml to drone/mobile controller for the drone, as you mention only qgis for creating waypoints.
Thank you
Μου αρέσει!Μου αρέσει!