
Drone με κάμερα 21MP χρησιμοποιήθηκε για την αποτύπωση περίπου 136 στερεμάτων. Έγινε σχεδιασμός πτήσης σε 2 κατευθύνσεις για να μηδενιστεί το φαινόμενο dome λόγω της μεγάλης καμπυλότητας του φακού. Η πτήση διήρκεσε 15 λεπτά όπως επίσης και η συλλογή 7 προκαθορισμένων φωτοσταθερών σημείων για την επίλυση του φωτογραμμετρικού μπλοκ. Για την αποτύπωση των φωτοσταθερών χρησιμοποιήθηκε RTK GNSS δέκτης. Παράλληλα μετρήθηκαν διάφορα σημεία για τον έλεγχο της οριζοντιογραφικής ακρίβειας του φωτομωσαικού όπως και για την υψομετρική ακρίβεια του ψηφιακού μοντέλου εδάφους.
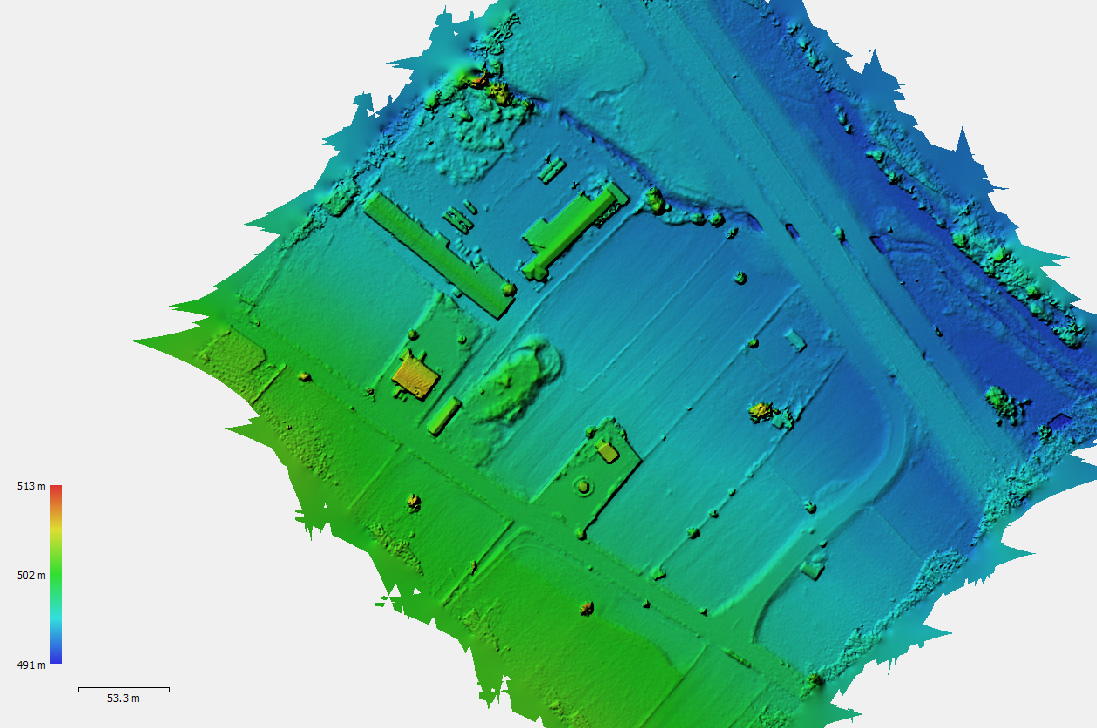
Η επίλυση του φωτογραμμετρικού μπλοκ όπως επίσης και τα παράγωγα: point cloud, ψηφιακό μοντέλο εδάφους DSM και ορθοφωτομωσαϊκό, πραγματοποιήθηκαν με opensource λογισμικό.



Ακρίβεια φωτοσταθερών σημείων από την επίλυση του φωτογραμμετρικού μπλοκ
a/a X(μ.) Y(μ.) Z(μ.)
————————————-
1 0.028 0.000 -0.070
2 0.021 0.014 -0.056
3 -0.008 0.005 -0.051
4 0.004 -0.029 -0.092
5 -0.010 -0.009 -0.067
6 -0.019 0.004 -0.040
7 0.001 0.018 -0.034
————————————-
RMSe 0.016μ. 0.014μ. 0.061μ.
Σημεία ελέγχου rmse: 0.0045μ. 0.0220μ. 0.0203μ.
Έλεγχος 293 υψομετρικών σημείων στο DSM – ψηφιακό μοντέλο εδάφους:
Τυπική Απόκλιση: 0.037μ. και μέσο τετραγωνικό σφάλμα: 0.054μ.



